The Problem
Ride comfort in autonomous vehicles is a control problem: the MPC controller must balance trajectory tracking, safety, and passenger comfort simultaneously. The standard approach is to hand-tune the cost function weights — a tedious, unprincipled process that produces parameters with no theoretical justification. Every time vehicle dynamics change, the tuning starts over.
The question: can the cost function weights be derived from theory rather than adjusted by hand?
What MOLECULA Does
MOLECULA is an LTV-MPC architecture where the cost function weights are derived from a proprietary theoretical framework. The derivation is not empirical — it proves that a specific weight schedule follows from the mathematical structure of the comfort-tracking trade-off.
The weight schedule is not static. It adapts to driving conditions in real time, shifting between competing objectives (comfort vs. tracking vs. safety) as the regime changes. The schedule is not learned from data or tuned by simulation sweeps — it is a direct consequence of the underlying theory.
The method is not public. The architecture is designed for licensing or co-development.
Why This Matters
Hand-tuned MPC weights have three problems:
No justification. Why this number and not another? Tuned weights answer "what works" but never "why."
No optimality proof. You cannot prove a tuned weight is optimal — only that it passed your test suite.
No transferability. Change the vehicle, change the conditions, start over. Tuned weights are bound to the system they were tuned on.
MOLECULA solves all three. The weights are derived, provably optimal under stated assumptions, and the derivation generalizes across vehicle platforms because it depends on the mathematical structure of the problem, not on the specific hardware.
Architecture
LTV-MPC — Linear Time-Varying Model Predictive Control with a principled weight schedule governing the cost function across driving regimes.
Regime-adaptive weights — the controller does not use fixed weights. The weight schedule evolves with driving conditions, following a trajectory prescribed by the theory.
Comfort-tracking-safety trade-off — the three competing objectives are balanced by the derived schedule, not by an engineer's judgment call.
Simulation Results
Simulation Setup
- Vehicle model: 8-state kinematic/dynamic model (position, heading, velocity, acceleration, jerk — longitudinal and lateral)
- Scenario: 30-second mixed urban-highway cycle (acceleration, curves, braking, lane changes)
- Baseline: trajectory-tracking controller without comfort optimization, under identical constraints
- Metrics: ISO 2631-1 weighted RMS acceleration, jerk RMS (longitudinal + lateral), Vibration Dose Value
- Conditions held constant: reference trajectory, state/control constraints, road disturbance profile (ISO class-C)
- Objective: compare ride-comfort performance under matched operating conditions
Baseline MPC vs. MOLECULA on a mixed urban-highway driving cycle. All metrics evaluated under identical trajectory and constraint conditions.
Acceleration Comfort (ISO 2631)
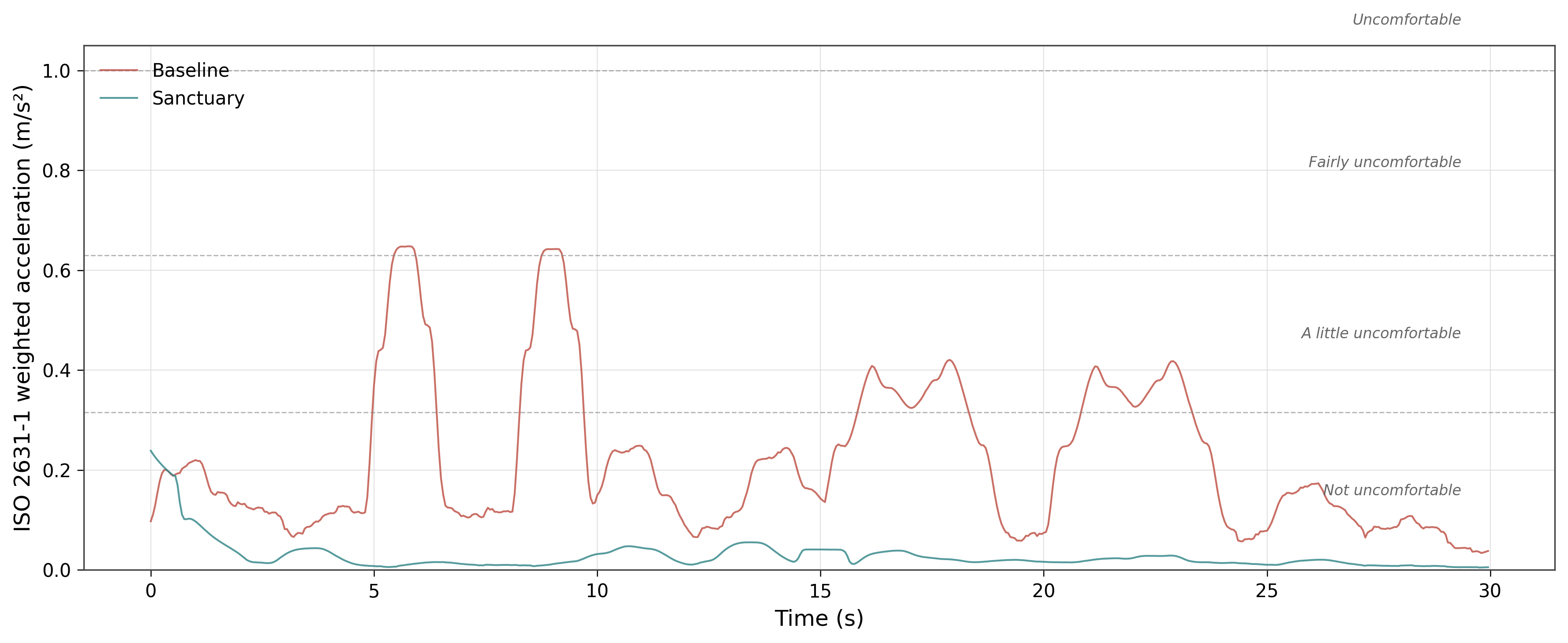
Weighted RMS acceleration reduced by 83.4% — from 0.264 to 0.044 m/s². Baseline repeatedly enters the "A little uncomfortable" and "Fairly uncomfortable" ISO bands. MOLECULA stays in "Not uncomfortable" throughout the entire cycle.
Jerk Profile
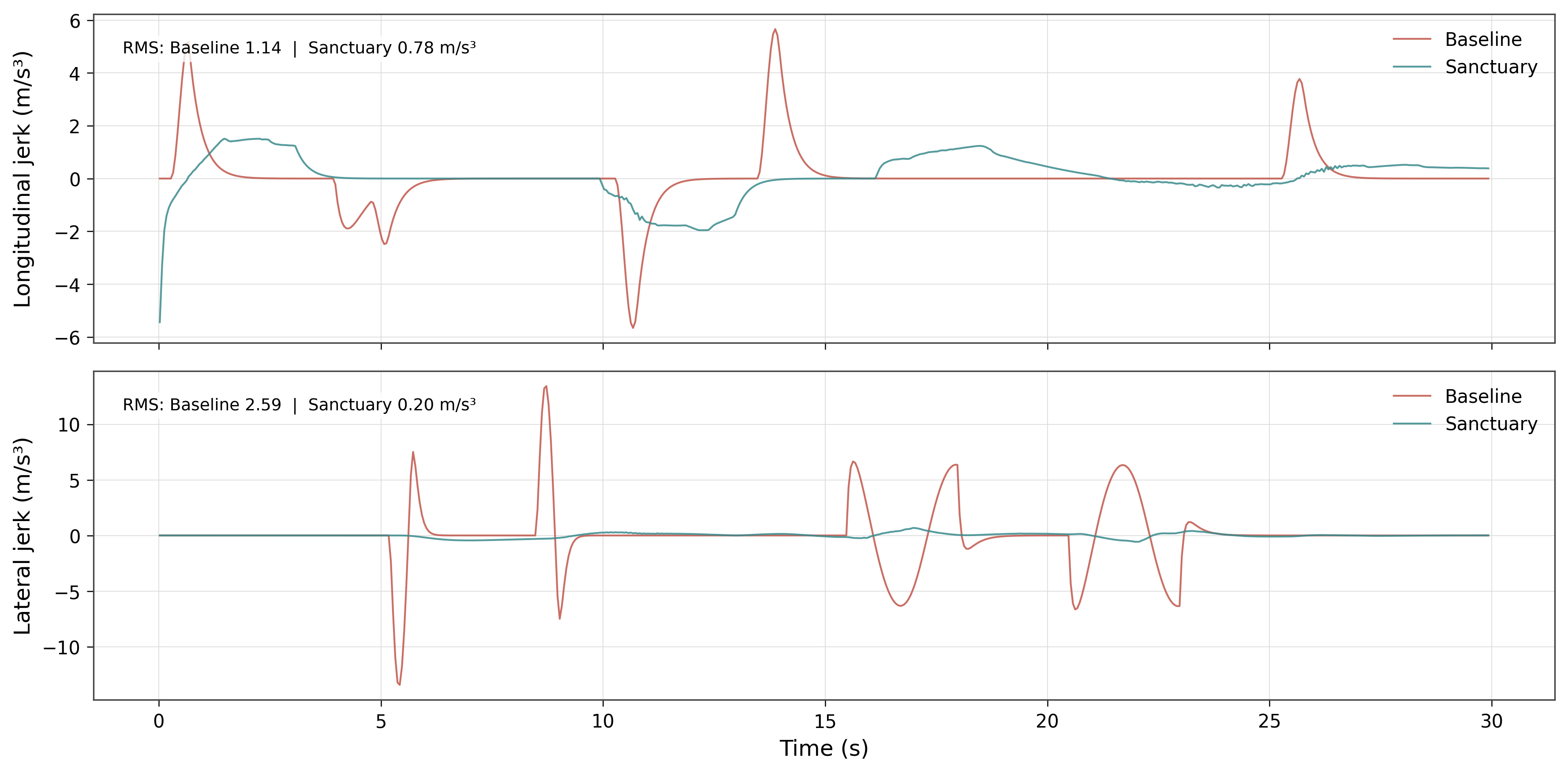
Longitudinal jerk RMS reduced by 31.3%. Lateral jerk RMS reduced by 92.3%. The lateral result is the more significant one — lateral jerk is the primary driver of passenger discomfort in lane changes and curves, and it is nearly eliminated.
Suspension Transfer Function
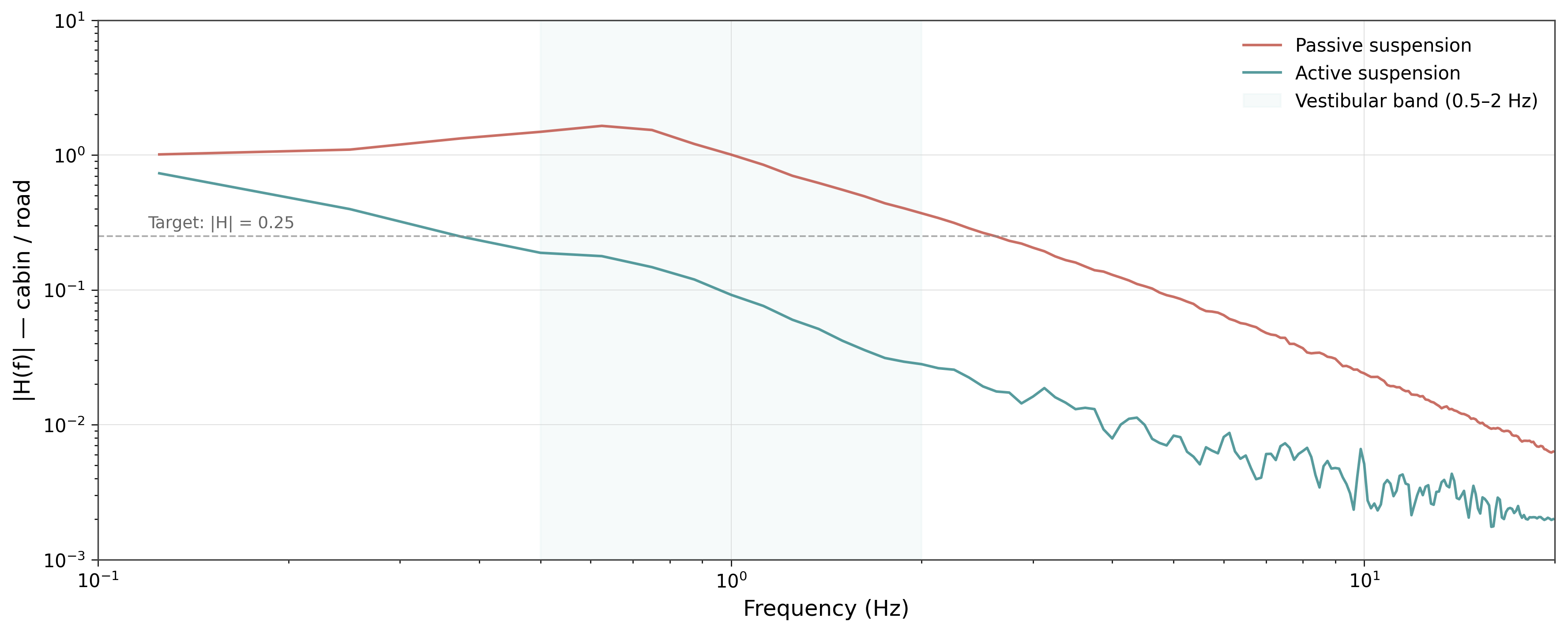
Active suspension achieves |H(f)| = 0.19 in the 0.5–2 Hz vestibular band, well below the 0.25 target. The shaded region marks the frequency range where motion sickness sensitivity is highest.
Vibration Dose Value (VDV)
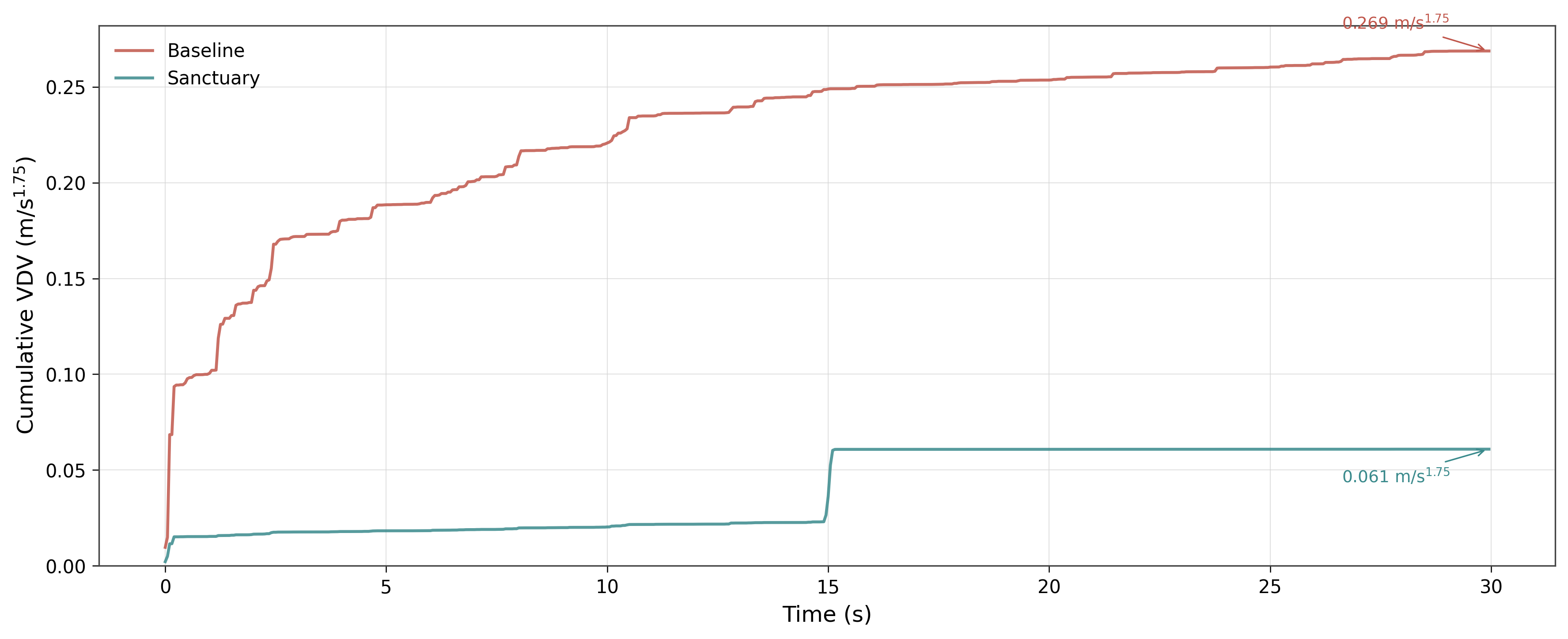
VDV reduced by 77.3% — from 0.269 to 0.061 m/s¹·⁷⁵. VDV is the ISO 2631 cumulative metric that accounts for both magnitude and duration of vibration exposure. This is the bottom-line number for ride comfort assessment.
Current Status
Actively pursuing two tracks:
- Seed funding for prototype development and simulation validation
- Academic collaboration for control-theoretic validation
What We're Looking For
MOLECULA is positioned for a seed-stage venture or a research partnership. The theoretical foundation is complete. The next steps are simulation validation on realistic vehicle models and eventually hardware deployment.
If you work in autonomous vehicles, robotics, or applied control theory — this is a conversation worth having.
Contact: omar@nosleepsystems.com